JINAN HAOYU AUTOMATION SYSTEM CO., LTD
Tel: +86-139 6409 7227 E-mail: sunny@haoyuwelding.com
Get A Free Quote
x
Get A Free Quote
x



The company's
plant area
Professional welding
experience
Export to more than
60 countries
Machine
warranty
Response within 2 hours,Lifetime technology support
Free on line training and our factory site training
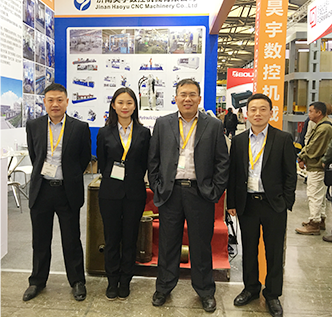
Jinan Haoyu Automation system Co., Ltd (another Affiliate is Jinan Haoyu CNC Machinery Co., Ltd) is a professional automatic welding machinery manufacture in Shandong province, China mainland ,founded in 2004.We have a strong design and technical team and can design and manufacture the machines as customer's workpiece and requirements.
Find out more